- 1. 중공 회전 테이블
-
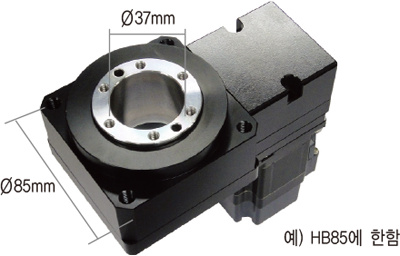
출력 테이블을 관통하는 대구경의 중공(Hollow Bore)은 설치가 복잡한 배선 및 배관에 활용할 수 있도록 구비되어 있어 장비 설계의 유연성 및 편리성을 도모합니다.
-
| 모델명 |
대좌 크기 |
중공 직경 |
| HB60 |
60mm |
Ø27mm |
| HB85 |
85mm |
Ø37mm |
| HB130 |
130mm |
Ø55mm |
- 2. 정밀 타이밍 벨트 구동
-
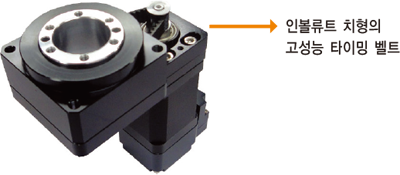
백래쉬가 매우 작은 타이밍 벨트로 구동하므로 일방향에서의 반복 위치 결정 정도는 ±30sec, 양방향에서의 위치 결정에 의한 Lost Motion은 6min 이하의 정밀 위치 결정이 가능하고, 인볼류트 치형의 타이밍 벨트를 사용하여 전동 용량이 크고 저소음 구동이 가능합니다.
- 3. 고강성 실현
-
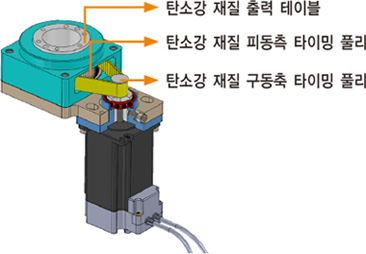
고강성의 Deep Groove Ball Bearing 2개를 중공 로타리 테이블과 일체화하여 허용 Thrust 하중과 허용 Moment 하중을 극대화하였으며, 고강도 탄소강 재질의 타이밍 풀리를 사용하여 내마모성을 강화하고 내구성을 획기적으로 향상시켰습니다.
- 4. 긴 내구 수명 실현
-
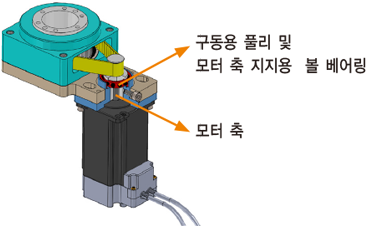
타이밍 벨트 구동 Actuator에서 가장 흔하게 발생하는 구동 모터의 축 파단 문제점을 해결하기 위하여 모터 축에 직접 결합되는 구동용 풀리를 베어링으로 견고하게 지지하여 타이밍 벨트의 장력에서 기인하는 굽힘 모멘트에 의한 구동모터 축의 피로 파괴 문제를 해소하였으므로 제품의 내구 수명을 획기적으로 향상시켰습니다.
- 5. Fast Response
-
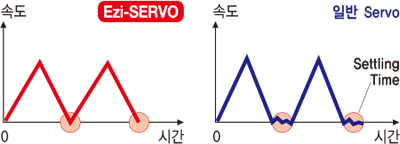
Ezi-SERVO는 스텝핑 모터의 장점인 지령 위치에 매우 큰 추종성을 이용하기 때문에 위치 결정시간이 매우 짧습니다. 따라서 단핏치 운동이 빈번한 경우, 위치 결정시간을 대폭 단축할 수 있습니다. 일반적인 서보 시스템에서 지령위치와 응답위치 사이에는 지연이 발생하고 지령위치의 종료 후 응답위치에 도달하기 위해서는 시간이 필요하므로 위치결정 시간이 증가합니다. (Settling Time) Ezi-SERVO는 스텝핑 모터의 장점을 이용하므로 응답 지연 없이 고속의 위치 결정이 가능합니다.
- 6. 다양한 네트워크 지원
-
Ezi-Robo HB는 고성능 폐루프 스텝 드라이브인 Ezi-SERVO가 결합된 유니트 제품입니다. EtherCAT, Ethernet, CC-Link등의 필드 네트워크를 지원하는 Ezi-SERVO 드라이브는 해당 필드 네트워크를 통해 PC/PLC 등의 마스터 컨트롤러와 연결이 가능합니다. Ezi-SERVOⅡ Plus-E 제품의 경우 Windows 7/8/10 모션 라이브러리(DLL)를 제공합니다.

- 7. 급격한 부하 변동이나 급가속에도 대응
-
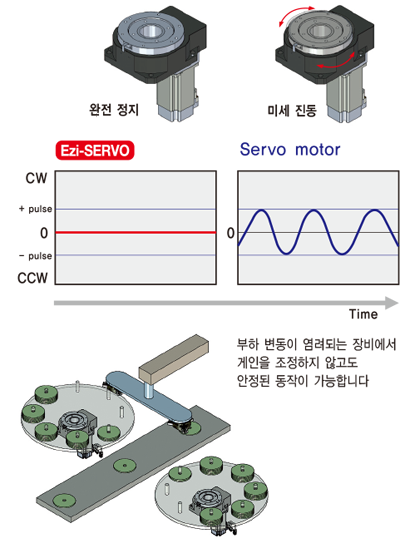
Ezi-Robo HB series는 탈조가 없는 폐루프 스텝핑 모터 제어 시스템인 Ezi-SERVO로 구동되기 때문에 급격한 부하 변동이나 급가속 상황에서 일반적인 서보 시스템에서는 쉽게 발생하는 미세 진동 즉, 헌팅 문제가 발생하지 않습니다. 더불어 일반적인 서보 시스템에서 급격한 부하 변동 대응에 필수적인 Gain 조정이 필요치 않은 Tuning Free Actuator 입니다.
- 8. 풍부한 입/출력 신호 및 사용자 정의 기능
-
Ezi-SERVO 드라이브는 여러개의 입/출력 신호를 처리하는 기능을 제공합니다. 별도의 I/O 장치없이 장비를 구성 할 수 있습니다.
· EtherCAT : 입력 7점 / 출력 6점
· CC-Link : 입력 7점 / 출력 6점
· Ethernet : 입력 9점 / 출력 9점
* 입/출력 신호에 대한 상세한 내용은 각 드라이브의 카탈로그 또는 매뉴얼을 참조하십시오.
- 9. Position Table Function
-
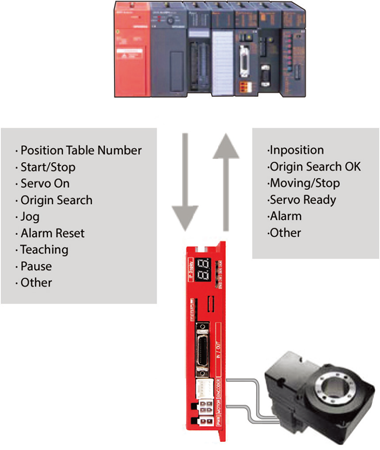
Position Table은 최대 256개의 위치 데이터 및 모션 조건 등을 Flash 메모리에 저장할 수 있습니다. 상위 제어기 (예, PLC)의 입력 및 출력 신호를 이용하여 모션 구동이 가능하도록 합니다. PLC로부터 Position Table 번호, 모션 시작 / 모션 종료, 원점 복귀 등의 입력 신호를 직접 조작함으로써 모터를 구동할 수 있습니다. 또한 PLC는 드라이브의 인포지션, 원점 복귀 완료, 이동 중 / 이동 종료, Servo Ready 등의 출력 신호를 확인할 수 있습니다.
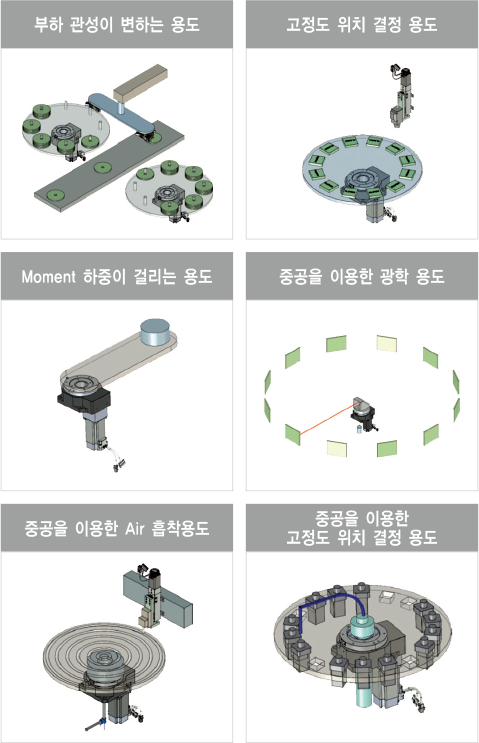
- 11. Ezi-Robo HB 활용 예