Hybrid Linear System 개요
-
NEMA 사이즈 판매 가능 버전 모터 길이 및 판매 가능 제품
전류(전압) 정보최대 추력 권장 부하 한계*1 스크류 리드 범위 1.8도 NEMA8 스텝 모터 
Single Stack(27mm) :
0.5A(2.5V)78N
(17.5lbs)43N
(9.7lbs)0.012” ~ 0.315”
(0.30mm ~ 8.00mm)Double Stack(38mm) :
0.5A(4.4V)84N
(18.9lbs)1.8도 NEMA11 스텝 모터 
Single Stack(34mm) :
0.5A(4.5V), 1.0A(2.2V)230N
(51lbs)150N
(34lbs)0.025” ~ 0.400”
(0.635mm ~ 10.16mm)Double Stack(45mm) :
0.95A(3.9V)340N
(76lbs)1.8도 NEMA14 스텝 모터 
Single Stack(34mm) :
0.5A(6.6V), 1.0A(3.3V), 1.5A(2.2V)450N
(100lbs)230N
(52lbs)0.024” ~ 0.500”
(0.6096mm ~ 12.7mm)Double Stack(46mm) :
0.5A(12.0V), 1.0A(6.0V), 1.5A(4.0V)610N
(135lbs)1.8도 NEMA17 스텝 모터 
Single Stack(34mm) :
0.5A(7.2V), 1.0A(3.6V), 1.5A(2.4V)710N
(160lbs)230N
(52lbs)0.024” ~ 0.500”
(0.6096mm ~ 12.7mm)Double Stack(48mm) :
0.5A(11.0V), 1.2A(4.5V), 2.5A(2.2V)900N
(200lbs)1.8도 NEMA23 스텝 모터 
Single Stack(45mm) :
1.0A(6.4V), 2.0A(3.2V), 3.0A(2.1V)1400N
(315lbs)920N
(210lbs)0.025” ~ 1.000”
(0.635mm ~ 25.4mm)Double Stack(65mm) :
1.0A(10.8V), 2.5A(4.2V), 4.0A(2.4V)1800N
(405lbs)1.8도 NEMA34 스텝 모터 
Single Stack(76mm) :
1.3A(12.0V), 3.0A(5.1V), 5.5A(2.85V)2400N
(540lbs)2160N
(485lbs)0.100” ~ 1.000”
(2.54mm ~ 24.4mm) - *1 : 이 정보들은 일반적인 부하에 대한 한계값입니다.
위의 '권장 부하 한계'를 넘어선 값으로 제품을 구동하실 경우 시스템의 수명이 단축될 수 있습니다.
기술 개요
- A 지점에서 B 지점으로 부하를 이동시킬 때 가장 많이 사용되는 방법 중 하나는 기계적 리드 스크류와 너트에 의한 모터의 직선 운동으로 변환하는 것입니다. 이 섹션에서는 고객 여러분들의 적용 분야에 최고의 시스템을 선택하기 전에 리드 스크류 기술의 기본 원리의 이해를 돕고자 합니다. 또한 고객 여러분의 이해를 돕기위해 아래에 '기술 용어 설명'을 준비하였으니 이를 활용하시기 바랍니다.
제품 설계 시 기본 고려사항
- 1. 시스템의 부하는 얼마입니까?
- 2. A 지점에서 B 지점으로 이동하는데 요구되는 속도는 얼마입니까?
- 3. 이동해야할 거리는 얼마입니까?
- 4. A 지점에서 B 지점으로 이동하는데 요구되는 시간은 얼마입니까?
- 5. 고객의 시스템에서 요구하는 정밀도는 어느 정도입니까?
- 6. 고객의 시스템에서 요구하는 반복 정밀도는 어느 정도입니까?
- 7. 수평 또는 수직 방향입니까?
Hybrid Linear System 개요
-
정밀도 리드를 기준으로 하여 이론적인 이동 거리 대비 실제 이동 거리의 차이를 말함 축부하 스크류 중심 선(센터 라인)에 가해지는 부하 역운전(Backdriving) 스크류에 축방향으로 가해지는 부하의 결과로 너트와 스크류가 헛도는 현상 백래쉬 스크류와 너트 사이의 상대적인 축 운동 Chopper Drive 정전류 드라이브는 일반적으로 Bipolar 입니다. Chopper 드라이브는 모터 전류를 제어하기 위해
빠른 속도로 전원이 On / Off를 교체할 수 있는 기술로부터 명명된 드라이브입니다.
Chopper Drive는 고속에서 스텝 모터의 토크를 더 강하게 유지함을 가능하게 합니다..열강도 압축 상태에서 부하를 견딜 수 있는 스크류의 성능을 의미합니다. 임계 속도 스크류의 회전 속도가 최초 공명 영역에 도달하게 되는 속도를 말합니다. 드래그 토크 시스템의 마찰을 극복할 수 있는 토크의 전체 합을 말합니다. 동부하 구동 중 스크류에 가해지는 부하를 말합니다. 효율성 입력을 동일한 출력으로 변환할 수 있는 기구적인 시스템의 성능을 말합니다. 고정성(선단부) 스크류의 끝부분을 확보시켜 주거나 지원해주는 방법을 말합니다. 리드 스크류 1회전 당 직선으로 이동하는 거리를 말합니다. 왼쪽 방향 나사선 시계 반대 방향 회전을 의미합니다. 피치 각 나사선 간 축 거리를 말합니다. 반경 방향 하중 스크류에 직각 또는 수직선으로 가해지는 하중을 말합니다. 반복 정밀도 스크류와 너트 시스템이 주어진 위치 명령에 반복적으로 도달 할 수 있는 능력을 의미합니다. 분해능 액츄에이터(모터)의 출력 샤프트의 직선 인크리멘탈 거리는 입력 펄스 당 이동하게 됩니다. 공명 기구적인 시스템이 불안정한 영역에 있을 때 기구적으로 진동이 발생하는 경우를 말합니다. 오른쪽 방향 나사선 시계 방향 회전을 말합니다. 가로 하중 축 방향 하중과 같습니다.(매우 바람직함) 정하중 스크류가 견딜 수 있는 정도로 부여되는 하중을 말합니다. 직진도 스크류의 선형 균일성을 의미합니다. 진동 총 합계 스크류 직진도의 측정량 합계를 말합니다. 스텝별 이동거리 모터의 전체 Full 스텝의 선형 변환을 의미합니다.
기초용어 설명
- 1. Leads vs Pitch
- 리드 : 스크류 나사가 한 바퀴 전진하는 축 방향거리
- 피치 : 인접한 나사 사이의 축 방향 거리
- 사이트 내에서 리드는 스크류의 한 회전당 움직이는 직선 거리로서의 스크류를 정의하는 용어로 사용될 것입니다. 더 큰 리드는 결국 스크류의 한 회전 당 움직이는 직선거리를 더 크게 합니다. 피치는 나사산의 서로 대응하는 두 점을 축선에 평행하게 측정한 거리를 말합니다.
- 2. 로드
- 일반적으로 lbs 또는 kg의 무게를 이동하거나 추력을 위한 파운드 포스(lbsF) 또는 KgF로 정량화
- 3. 속도
- 일반적으로 고객의 시스템에 요구되는 초당 인치, 초당 mm로 정량화
- 4. 거리
- 일반적으로 필요한 이동 거리를 인치 또는 mm로 정량화
- 5. 시간
- 일반적으로 초 단위로 정량화됩니다. 주어진 거리에 필요한 시간은 명령된 위치에 도달하기 위해 필요한 속도, 가속도(A) 및 감속을 정의합니다. 가속도(A) 및 지령 위치에 도달하는데 필요한 감속도.
- 6. 수평 또는 수직방향 적용
- 수직 방향의 시스템은 모터의 전원이 꺼지거나 브레이크가 장착 되어있지 않을 경우 뒤로 밀릴 수 있는 잠재적인 문제점을 가지고 있습니다. 또한 수직 방향의 시스템은부하 / 토크를 계산하는데 필요한 추가적인 중력 요소를 가집니다.
- 7. 스크류의 정밀도
- 주어진 스크류의 길이를 측정함으로써 지정됩니다. 예를 들어 인치 당 0.0006의 경우 리드 스크류의 정밀도는 리드를 기준으로 이론적으로 이동되는 거리 대비 실제 이동한 거리의 차이를 리드 스크류의 정확도로 계산하게 됩니다. 0.5인치의 리드와 0.004인치의 리드 스크류 정밀도를 가진 스크류가 24번 회전할 경우 이론적으로 너트는 12인치를 이동해야 합니다. 그러나 0.004인치의 리드 정밀도를 가진 스크류는 실제 11.996인치에서 12.004인치 사이에서 이동하게 됩니다.
- 나사의 중심선을 기준으로한 ‘흔들림’의 양
- 9. 반복 정밀도
- 대부분의 모션 적용 분야에서 반복 명령을 내렸을 때 지속적으로 동일한 목표 위치에 도달하는 정도를 의미함.(스크류의 정밀도에 비교해서) 예를 들어 ±0.005라는 반복 정밀도는 반복되는 위치 명령에 대해 항상 같은 목표 위치에 도달해야 하며, 이 때 선형 에러가 0.005인치 이상이 되지 않는 것을 의미합니다.
- 10. 반경 방향 하중
- 스크류에 수직 방향으로 주어지는 하중입니다. 예를 들어 리니어 가이드와 같이 추가적으로 기구적인 지원이 사용되지 않는 한 권장되는 하중이 아닙니다.
- 반경 방향 하중(사용을 피하거나 최소화합니다)
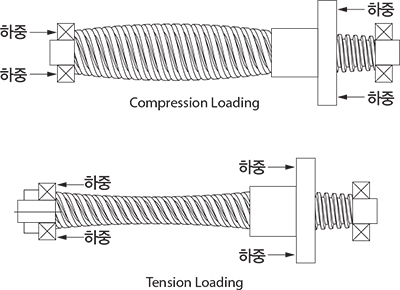
- 11. 인장 또는 압축 하중
- 스크류가 늘어나려 하는 경향의 부하를 인장 하중이라고 합니다. 그리고 부하가 줄어들거나 압축되려 하는 스크류의 부하를 압축 하중이라고 합니다. 이는 부하의 크기에 따라 달라지며, 인장에 대한 스크류를 디자인할 때 열 하중(Column Loading) 대비 스크류의 축 강도를 활용합니다.
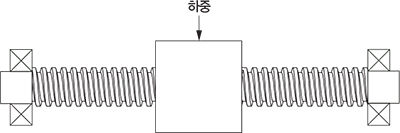
- 12. 축방향 하중
- 리드 스크류 중심선(센터 라인)에 가해지는 하중

- 리드 스크류의 중심선에 가해지는 하중(가장 좋음)
- 13. 정하중
- 움직이지 않는 스크류에 가해지는 충격 부하를 포함한 최대 추력 하중
- 14. 동하중
- 구동 중 스크류에 가해지는 최대 추력 하중
- 15. 역운전(Backdriving)
- Backdriving은 회전 운동을 만들기 위한 스크류나 너트에 축방향으로 가해지는 부하에 따른 결과입니다. 일반적으로 50% 이상의 효율성을 가진 너트의 경우 Backdriving되는 경향이 많습니다. 35% 이하의 효율성을 가진 리드 스크류를 선택하실 경우 이러한 Backdriving을 방지하실 수 있습니다. 작은 Lead를 선택하실수록 Backdriving이나 공회전의 가능성을 최소화할 수 있으며, 수직 방향의 시스템에서는 중력 때문에 Backdriving이 더욱 쉽게 발생할 가능성이 있습니다.
- 16. 토크
- 리드 스크류를 구동하기 위해 요구되는 모터 토크는 하기 토크들의 합으로 예상됩니다.
- 1. 관성 토크
2. 드래그 토크(구동 중 너트와 스크류의 마찰)
3. 부하를 이동하는데 필요한 토크
- 17. 윤활
- 너트 재료는 시스템에 추가적으로 윤활유를 부여해야 하는 필요성을 없애주는 자가 윤활 물질을 포함하고 있습니다. 또한 테프론 가공이 되어 있는 스크류 옵션을 사용하실 경우 마찰이 감소되어, 시스템의 수명을 연장시킬 수 있습니다.
- 18. 고정성
- 스크류 시스템의 성능(속도 및 효율성)은 스크류 끝단이 어떻게 부착되고 지원되는지에 영향을 받습니다.
-
끝단 고정 형태 관련 강도 임계 속도
변수임계 부하
변수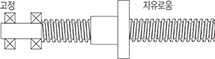
덜 강함 32 25 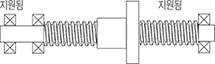
강함 1.00 1.00 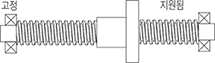
더 강함 1.55 2.00 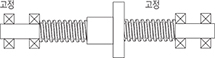
가장 강함 2.24 4.00
- 19. 스크류의 선단 가공
- 고객 요구 사항에 따라 표준 미터법 또는 인치식 옵션을 사용할 수 있습니다. 또한 요구 사항에 따라 스크류 선단가공 역시 가능합니다.
-
나사선 가공 
표준형 선택
사양들에 대해서는
각 NEMA 사이즈
섹션을
참조해 주시기
바랍니다.
'고객 맞춤형'
선단 가공 역시
가능합니다.예시
UNC end :
#8-32 UNC thread
Metric end :
M4 x 0.7mm threadSmooth 가공 
예시
Ø0.1967˝ ±0.001
Ø5mm ±0.025없음 
-
- 20. 열 강도(Column Strength)
- 스크류가 압축될 경우 탄성 안정성 한계를 초과할 수 있으며 스크류가 구부러지거나 변형됨을 통해 손상될 수 있습니다.
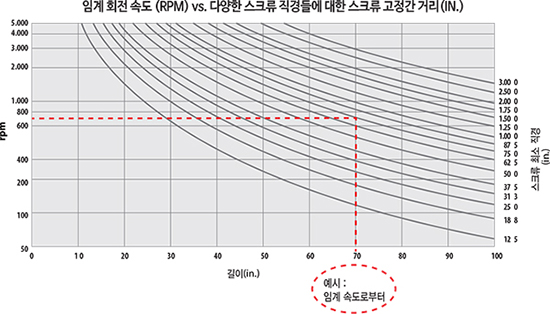
- 21. 임계 속도(위험 속도)
- 임계 속도는 스크류의 결함으로 인해 스크류의 회전 속도가 최초 공명 영역에 도달하게 되는 속도를 말합니다. 이 속도 영역에서는 시스템이 진동하고 불안정하게 됩니다
- 임계 속도 도달에 영향을 미치는 변수
- 1. 스크류의 리드
2. 회전 속도
3. 끝단 고정성
4. 스러스트 하중
5. 스크류의 직경
6. 인장 또는 압축 하중 - 예를들어, 아래의 표에서 3/4인치 직경 및 70인치 길이의 스크류에 대한 임계속도는 7,000[rpm]입니다.
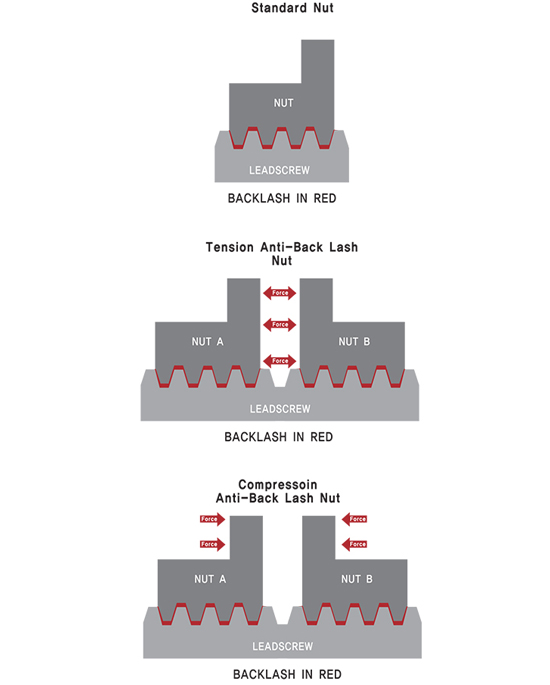
- 22. 백래쉬
- 백래쉬는 스크류와 너트 사이의 상대적인 축 방향 이동이라고 할 수 있습니다. 시간이 지남에 따라 백래쉬가 함께 증가하는 것이 정상입니다. 백래쉬의 보상이나 수정은 백래쉬 방지 너트를 사용함으로서 수행될 수 있습니다. 백래쉬는 오로지 양방향 위치에만 관련합니다.