
- 1. Network Based Motion Control
-
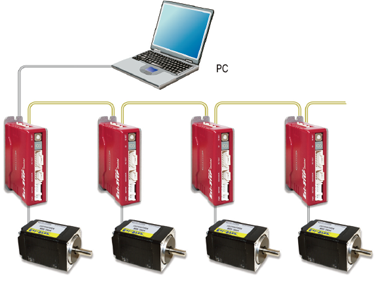
PC와 같은 상위 제어기와 RS-485 통신을 통하여 최대 16축까지 구동할 수 있습니다. 모든 모션 제어 기능은 네트워크 통신을 통해 제어 가능하며, 모션 관련 조건(예, 가감속 시간)은 파라미터로써 ROM에 저장됩니다.
Windows 7/8/10에서의 프로그래밍을 위하여 모션 라이브러리(DLL)가 제공됩니다.
- 2. Position Table Function
-
Position Table은 최대 64개의 위치 데이터 및 모션 조건 등을 Flash 메모리에 저장할 수 있습니다. 상위 제어기 (예, PLC)의 입력 및 출력 신호를 이용하여 모션 구동이 가능하도록 합니다.
PLC로부터 Position Table 번호, 모션 시작 / 모션 종료, 원점 복귀 등의 입력 신호를 직접 조작함으로써 모터를 구동할 수 있습니다. 또한 PLC는 드라이브의 원점 복귀 완료, 이동 중 / 이동 종료, Servo Ready 등의 출력 신호를 확인할 수 있습니다.

- 3. Microstep and Filtering(고정도 마이크로 스텝 기능 및 Filtering)
-
고성능 MCU에 의해 기본 분해능인 1.8°를 최대 1/250(0.0072°)까지 분할 가능합니다.
기존의 드라이브와 달리, Ezi-STEP은 PWM 제어를 매 25 μsec 마다 수행하기 때문에 보다 정밀한 전류 제어가 가능함에 따라, 고정도 마이크로 스텝이 가능합니다.
또한 극저속 영역에서 입력 펄스의 Software Filtering 기법에 의해 부드러운 운전이 가능합니다.
- 4. 다양한 출력 신호 및 모니터링
-
탈조 발생 시 알람 신호 발생은 물론, 다양한 알람 종류에 의해 알람 신호가 발생합니다.
또한 동작 중(Run/Stop) 신호를 출력함으로써 상위제어기와의 편리한 인터페이스를 제공합니다. (알람 발생 종류는 LED에 의해 모니터링이 가능합니다.)
- 5. Software Damping(Software Damping에 의한 진동 억제 및 고속운전)
-
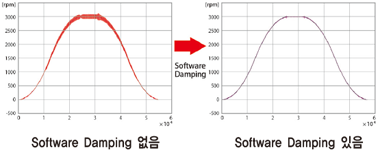
마이크로 스텝 구동 시 스텝핑 모터에 가하는 전류는 정확한 정현파 형태지만, 실제로 모터 마그네틱 플럭스의 비선 형성, 고속 영역에서의 역기전력 증가에 의한 모터 전류의 감소, 모터 상간 전압의 감소 등 모두 스텝핑 모터의 진동을 유발하는 원인입니다. Ezi-STEP은 이 비선형성을 고성능 MCU에 의해 감지하여, 이를 보상하기 위해 모터의 자극 위치에 대한 전류의 위상을 제어함으로써 진동 억제가 가능합니다. 스텝핑 모터의 진동 억제가 가능함에 따라, 고속 영역에서의 운전이 가능합니다.
-
※ 100,000 [pulse/회전] 엔코더를 이용한 실제 측정 속도임.

